
摘要:无人潜航器基于推进系统、控制系统和导航定位系统等部分的工作原理进行工作。它通过推进系统提供动力,通过控制系统进行指令的接收和处理,通过导航定位系统实现潜航器的定位和导航。这些系统的协同作用使得无人潜航器能够在水下进行自主或遥控的航行任务。
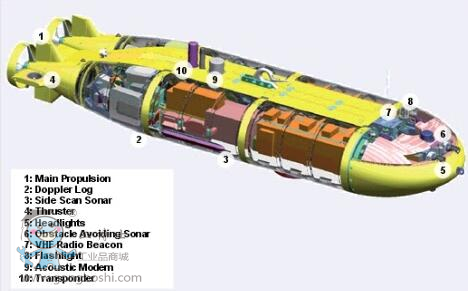
1、推进系统:无人潜航器的动力来源,通常采用电力推进,包括电机和推进器两部分,通过电机驱动推进器产生推力,使无人潜航器能够在水中自由移动。
2、控制系统:负责控制无人潜航器的各项功能和操作,控制系统接收来自操作人员的指令,通过控制算法对无人潜航器的推进、转向、深度等进行精确控制,还能根据环境和任务需求,自动调整无人潜航器的行为。
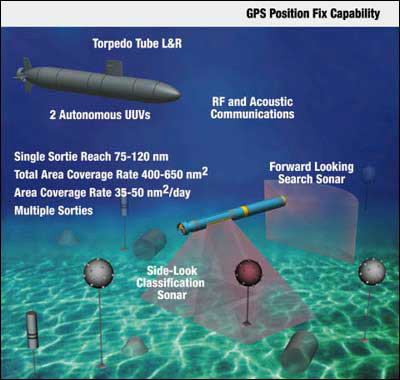
3、导航定位系统:无人潜航器的核心部分,包括导航系统和定位系统,导航系统根据预设的航线和目标,引导无人潜航器到达目的地,定位系统则实时获取无人潜航器的位置、速度和姿态等信息,为导航系统和控制系统提供准确的数据支持。
4、传感器:无人潜航器上通常装备有多种传感器,用于获取水下环境信息和目标信息,声呐用于探测距离和识别目标,摄像头用于观察目标情况,深度传感器用于测量水深等。
无人潜航器通过推进系统提供动力,控制系统实现功能控制,导航定位系统引导航线,并通过传感器获取环境信息,实现自主或遥控作业。










 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号